- Radar Design and Development Services
- Radar Simulators
- Radar KPI
- Swerling Radar Models
- Radar Ghost Target
- Radar Pulse Compression
- Pulsed Radar Architecture
- Radar equations, how many are there?
- What is Clutter?
- 3D mmW Radar for Automotive
- MIMO Radar
- Passive Radar
- Automotive, Short Range Radar (SRR) vs. Long Range Radar (LRR)
- Why Sphere is used to Calibrate RCS?
- Drone RCS
- FMCW vs. Pulsed Radar
- Pulsed Radar Applications in Consumer Electronics
- Wavelet Transform Radar Signal Processing
- Radar and Radio Communications Similarities
- What is Matched Filter and why it is used?
- Radar Beamwidth relationship to Radar Cross Section
- Bridging Radar and Radio Communications for Next-Generation RF Systems
- Designing for Seconds, Not Meters
- The Radar That Never Transmits
Radar Design and Development Services
Expertise across long-range, tracking, and millimeter-wave (mmW) radar systems for diverse applications.
From antenna design to ASIC development to advanced radar algorithms—and their implementation across hardware, firmware, and software—ORTENGA delivers end-to-end radar engineering.
ORTENGA works with businesses to identify the technical features and architectural decisions required to achieve their product and market goals.
Radar Simulators
Radar technologies have grown significantly in the past 10 years due to commercial applications as well as advanced semiconductor technologies ASIC.
Validating functionality and performance of any wireless device between transmitter and receiver in the open air requires meticulous design of experiment and difficult to begin with. Typically, multiple experiment must be done to capture adequate reliable information, in order to make assessment of that wireless device.
In case of radar, this validation is an order of magnitude more difficult, as the radar pulse and echo have to be captured in the open air. There are many circumstances that measurements can have a very low yield. Furthermore, that open air testing has high expense tag for every run and have to be repeated multiple times to have confident in the measurements.
Cost of testing any radar can range from couple hundred thousand to multi millions per year, depending on the platform to be tested and conditions of the testing.
Radars are used in aircraft, automotive, drone, ground base, ship, and train.
What is the alternative? Radar Simulators.
Radar system is comprised of HW, FW, and SW like any other radio system. To validate the functionality and performance these components, radar simulator can be used.
Radar simulator allows to various necessary algorithms, such as; gain control/dynamic range, direction finding, tracking, target identification.
ORTENGA helps businesses to identify required technical features to realize their business goals.
Radar KPI
Radio detection and ranging, radar key metric is probability of detection, Pd.
In radio communication QoS is probability of error, or error rate, BER or SER.
Radar probability of detection is directly proportional SNR, as in radio communication, BER is inversely proportional to SNR or Eb/N0.
As the SNR increases, the probability detection increases in radar. Furthermore, radar has false alarm rate, PFA that needs to minimized.
Therefore, just like radio communication which has Water Fall Curves that describes digital alphabets required BER or SER to SNR or Eb/N0, radar has probability detection vs. SNR for given false alarm rate.
The radar probability of detection vs. SNR for given probability of False Alarm do not have analytical or closed form solution and it is typically plotted using numerical technique.
The classic Skolnik radar handbook has plots which show the non-linear relationship between these parameters.
Target tracking radar requires higher SNR than target acquisition and detection radar for given probability detection and false alarm rate.
ORTENGA helps businesses to identify required technical features to realize their business goals.
Swerling Radar Models
Radar target echo is distorted by scintillation of Radar Cross Section, RCS.
This is similar to fading of signal in radio communication systems.
As a result, target echo signal level can change drastically up to 30dB over short period of time.
Classical Swerling has 4 radar models which allow radar designer to validate the functionality and performance of the radar.
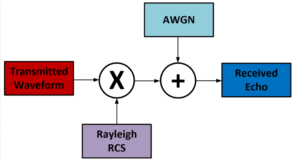
Swerling 1 model is utilized when the radar target RCS is slowly changing relative to dwelling time. It follows the Rayleigh distribution.
Swerling 2 model is utilized when the radar target RCS is rapidly changing relative to dwelling time. It follows the Rayleigh distribution as there are no dominant radar echo.
Swerling 3 model is utilized the radar target RCS is slowly changing relative to dwelling time. It follows the Rician distribution since there is a dominant radar echo.
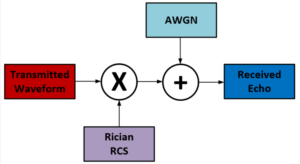
Swerling 4 model is utilized the radar target RCS is rapidly changing relative to dwelling time. It follows the Rician distribution since there is a dominant radar echo.
These models are similar to radio communication systems fading phenomena.
ORTENGA helps businesses to identify required technical features to realize their business goals.
Radar Ghost Target
In radar processing, ghost target appears when there is a multipath of echo signal reaching receiver.
This causes the receiver having difficulty in differentiating, identifying, and tracking the actual target.
Automotive radar experiences moving target as well as the radar equipment, which further exacerbates this ghost target vision situation and requires appropriate radar signal and data processing, in addition to front end HW.
The echo signal typically could have either Rician or Rayleigh profile for small scale fading.
In order to mitigate ghost target vision, there are 2 parameters that have to be carefully analyzed and designed, namely; pulse width and dwell timing.
These parameters are the knobs to avoid signal dispersion and time variant channel, respectively.
Obviously, understanding the multipath fading manifestation is fundamental in solving problems at hand.
ORTENGA helps businesses to identify required technical features to realize their business goals.
Radar Pulse Compression
As Radar technology becomes part of automotive and commercial drones, new requirements are developed to provide for this new market appropriately.
Some of the technical challenges to be addressed are stringent range and radial velocity resolution for moving target as well as radar itself.
It is well known that range resolution requires lower PRF, while radial velocity resolution requires higher PRF.
Obviously both requirements cannot be met, simultaneously.
Pulse compression technique is used to mitigate this issue.
PN pulses can be used in a way that can produce optimum resolution for both range and radial velocity. Barker code of various lengths provides an example of PN pulses.
ORTENGA helps businesses to identify required technical features to realize their business goals.
Pulsed Radar Architecture
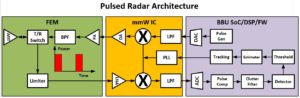
Pulsed radars are becoming more popular due to digital capability of pulse generation and detection, hence integrated circuits smaller geometry/die size, as well as enhanced range and radial velocity resolutions by appropriating designing pulse waveforms and repetitions.
The following is a typical pulse radar functional block diagram.
It should be mentioned that the electronic circuits for basic mmW radar could be as small as a smart phone.
And, for more stringent radar requirements, the overall physical size can grow to accommodate several antennas and the corresponding front ends’ HW.
Nowadays, radars are becoming part of automotive features and in few short years every autonomous car will be equipped with multiple radars.
Any advanced radar can have the capabilities to calibrate for environment in which it operates at, to reduce clutter and enhances SNR to improve radar performances.
ORTENGA helps businesses to identify required technical features to realize their business goals.
Radar equations, how many are there?
Radar equation relates transmit and received antenna gain, power, radar cross section, operating wavelength/frequency, range, and noise.
Consequently, radar signal to noise ratio can be computed.
There are 3 classes of radar; Search, Track, and Weather, each with its own radar equation which are used to relate physical design parameters to performance metric of a given radar.
Radar engineers use appropriate equation for designing and modeling given radar. Search radar is utilized to scan given sky volume to find target, an obvious example is airport radar.
Tracking radar is utilized to lock onto a target and track its movement. Whereas, Weather radar is utilized to analyze precipitations and movement of rain, snow, and/or storm.
Some important observations regarding radar equations are that Track and Weather radar equations have squared wavelength dependency, whereas Search radar does not, directly.
On the other hand, Track and Search radar equations have inverse quartic range dependency, whereas Weather radar has only inverse squared range dependency.
It should be noted that there other differences between each radar equation.
ORTENGA helps businesses to identify required technical features to realize their business goals.
What is Clutter?
Clutter is legacy radar terminology for background noise of target under surveillance, TUS.
Radar engineers make clear distinction between noises vs. clutter.
Noise is an unwanted signal that typically generated inherently by electronic systems, such as receiver.
Typical radio impairments are due thermal, phase error/time jitter, and quantization which are associated with noise.
Clutter on the other hand is the unwanted signal picked up by the antenna or antenna array in the radar system.
Typically, radiation pattern of antenna consists of main lobe, side lobes, and back lobe. The main lobe is wanted whereas side lobes and back lobe are unwanted radiations.
During signal reception, the side lobes and back lobe are also picking up signal, which is not from the target under surveillance.
Since the side lobes and back lobe are much lower level below the main lobe, the unwanted signal contributions due by them are also weaker within the receiver, nevertheless the clutter exist and needs to be quantified.
Therefore, radar systems engineers include clutter in the link budget of radar receiver.
ORTENGA helps businesses to identify required technical features to realize their business goals.
3D mmW Radar for Automotive
Radio Detection and Ranging, aka radar, has been used since WWII in military applications, then in Avionic, and recently entered into Automobile applications.
Automotive radar equipment are typically used for Collision Avoidance, however as Autonomous Car is becoming reality within few short years via advancement of wireless mobile communications, 5G, and connected cities, IoT, 3D mmW Radar will find its way into next generations of cars.
Originally, radar was meant to detect and provide the distance/range to the target.
Then, it evolved to provide the speed of the target using Doppler frequency shift of the Electromagnetic, EM, echo signal.
It further enhanced to estimate Time of Arrival, ToA, then Direction of Arrival, DoA, using pulsed waveform and measuring the round trip time of the echo signal.
The EM echo is created by reflection from the target.
Target effective area seen by radar is called, Radar Cross Section, RCS. Each target has its own radar signature/RCS and can be cataloged and used for identification with advance digital signal processing of the EM echo signal, aka radar signature.
Radars are characterized either by CW or Pulsed modulation. CW radar is better for frequency resolution of the echo, which translate to speed of the target, whereas Pulsed radar is better suited for time resolution of the echo, which translate to ToA.
3D mmW radar will provide 3 dimensional field of view of the car.
There have been handfuls of companies that make radar units for car manufacturers.
Now that the market is growing exponentially and the car radar is more than feature on high end cars, automobile manufacturers have started investing internally on radar technology design and development.
ORTENGA helps businesses to identify required technical features to realize their business goals.
MIMO Radar
MIMO aka Spatial Multiplexing is being used in 5G as well as WiFi technologies.
New Radars also utilize MIMO waveforms to optimize for position and velocity accuracy/resolution, simultaneously.
MIMO Radar also allows combination of Active and Passive illuminators, which can enhance the above resolutions.
MIMO relies and exploits multipath scatters and combines the received signals in a such way to optimize for SINR.
In radio communications application, there are handful of transmitted coding which are optimized per channel and predefined.
When SRS is transmitted, the receiver replies back a number which reveals the best signal coding received for that channel.
Then, the transmitter starts transmitting data with the same coding until the channel conditions are changed.
Similar algorithm can be utilized in the MIMO Pulsed Radar to enhance SINR.
ORTENGA helps businesses to identify required technical features to realize their business goals.
Passive Radar
Passive radar is when the EM signature pick up by the radar is not due to transmit signals by the radar itself, rather by other EM emitters such as TV station, Cellular base station, radio station, etc.
In other words, in the absence of actively sending EM signals and waiting for echo, the passive radar search for change in the EM signature in the vicinity of the passive radar and detects and perhaps identify the target of interests.
This technique requires much better receiver sensitivity to detect EM signals and process that incoming signals and compare it against bench mark signals which would have existed in the absence of the radar target in the first place.
Similar technique is used with WiFi signals in the closed area for tracking patients and elderly by Professor Dina Ketabi at MIT.
ORTENGA helps businesses to identify required technical features to realize their business goals.
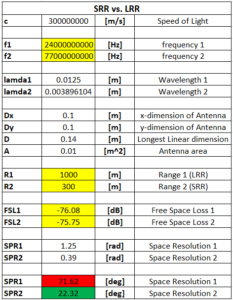
Automotive, Short Range Radar (SRR) vs. Long Range Radar (LRR)
Physics tell us that lower frequency has longer radio range whereas higher frequency provides shorter radio range via free space loss.
Also, Physics tell higher frequency, shorter wavelength provides better spatial resolution than longer wavelength, lower frequency.
Automotive market tells us that SRR and LRR are required for a successful product. Many automotive radar products have missed this product concept and cannot successfully capitalize on ROI.
The following table illustrates SRR vs. LRR.
If you ask these companies why haven’t design your product for both SRR and LRR, the typical response is cost concern.
The cost drove their product concept, even though there is not much market for short range or long range by itself.
This shows two fundamental conceptual product definition issue:
- The cost drove the definition of the product, instead of looking for a cost-effective solution which has successful ROI
- The definition product did not look for alternative architecture which can mitigate the cost
ORTENGA helps businesses to identify required technical features to realize their business goals.
Why Sphere is used to Calibrate RCS?
Radar Cross Section, RCS is the apparent cross section seen by a radar for given operating wavelength or frequency.
Needless to say, that RCS is not necessarily the physical or geometric cross section of target seen by radar.
Unit radius sphere is typically used for calibrating RCS.
Sphere scattering EM wave are isotropic.
Sphere is symmetric, consequently its RCS is independent of its aspect angle.
Sphere can be constructed for RCS measurements.
Theoretically sphere scattering performance can be accurately calculated and modeled.
All of the above make sphere an ideal RCS calibration platform.
Then, the actual target RCS can be compared to sphere RCS to account for any measurement errors.
ORTENGA helps businesses to identify required technical features to realize their business goals.
Drone RCS
Commercial drones are started as hobby and now find their ways in delivering vehicles and more as part of Smart City environment.
Remote drones’ navigation requires situational awareness which in turns require radar.
Consequently, these drones have to be aware of other drones and/or flying objects, and knowing RCS and drone radar signature becomes key for drones’ survivability in that environment.
At 1 cm wavelength, commercial drones have between 5 to -20 dBsm RCS depending on aspect angles and drone physical structure.
Furthermore, drones’ radar have to have some algorithms, such as clutter rejection, direction findings, and deal with multipath echo.
ORTENGA is comprised of seasoned and skillful engineers who collaborate on innovative design in entrepreneurial environment to accomplish clients’ project.
ORTENGA helps businesses to identify required technical features to realize their business goals.
FMCW vs. Pulsed Radar
Radio detection and ranging, aka radar, was invented to detect and estimate military target range before WWII, 1930’s. Originally this was done by transmitting a Continuous radio Wave, CW or sinusoidal, and listening to the echo bouncing back from the target of interest.
The echo signal intensity would be compared to clutter, noise level of the receiver, and if above certain threshold, it would indicate the existence of the target, i.e. detection.
The bigger the target, aka radar cross section/RCS, the stronger the echo signal is.
The echo signal would also be shifted in frequency, aka as Doppler shift. The Doppler frequency shift, frequency modulated CW/FMCW, is proportional to radial speed between radar and target.
The Doppler shift is negative relative to the CW, if the target is going away and positive if it is heading toward the radar.
During WWII, radar became extremely important and the race started to improve it by increasing the radar range that could detect a target.
This proved to be challenging as additional range meant much higher power, in fact by x4.
In other words, to double the radar range the transmitted power have to be increase by 16 times.
There were two problems, the obvious limitation of transmitted power and its security. The stronger the transmitted power of the radar, the more obvious to be detected itself and be neutralized.
The advance of electronic technology and digital signal processing algorithms enabled optimizing the required transmitted power and acquire additional information about the target, Pulsed radar was invented.
The pulsed radar provides better time stamp of the target by compromising the frequency information/speed resolution.
Nowadays, advanced radar can provide both accurate time and frequency of the target signature with what is known as Pulse Compression Radar.
Pulsed Compression Radar modulates pulses to optimize both range and speed of the target, while maintaining the transmitted power.
Current radars can tell much more information about the target, such as; radial speed, direction, size, track, and even identify the target.
Radar has found its market in commercial application and will be important feature of autonomous car, Positive Train Control/PTC, and auto pilot airlines.
ORTENGA helps businesses to identify required technical features to realize their business goals.
Pulsed Radar Applications in Consumer Electronics
ORTENGA sponsored “Pulsed Radar Applications in Consumer Electronics” webinar.
ORTENGA has seasoned engineering from Autonomous Automotive, SATCOM, radar, Smart City, WiFi, and Mobile Terrestrial Radio Communications System industries in Antenna, ASIC, Algorithm, HW, FW, and SW engineering disciplines.
Wavelet Transform Radar Signal Processing
Historically, Fourier Transform, FT is used for radar signal processing.
With the introduction of Fast Fourier Transform, FFT and advancement of DSP in ASIC, radar technology has significantly grown.
It is well known that there is fundamental limitation to time and frequency resolution which is govern by Ambiguity function.
Wavelet Transform, WT has however better time and frequency resolution.
WT relies on octave frequencies, i.e., even harmonics and ignore odd harmonics completely.
Octave based echolocation is used by bat.
Octave based signals are fundamental to music and harmonious.
Whereas, odd harmonics are not desired at least in human audio signals.
Orca echolocation sonar utilizes symmetric waveform, which have even and odd harmonics.
Orca sounds are not harmonious and could be frightening.
Chirped or phase coded radar waveform only contains even harmonic, in other words octave-based signals content.
Therefore, for these types of waveform, WT could be utilized for DSP by radar processor.
There appear some advantages by utilizing WT when asymmetric waveform are processed.
First, odd harmonics is not processed and it could save processing time.
Second, odd harmonic distortions caused by the radar system impairments mechanism cannot be confused as a real radar target.
ORTENGA helps businesses to identify required technical features to realize their business goals.
ORTENGA is comprised of seasoned and skillful engineers who collaborate on innovative design in entrepreneurial environment to accomplish clients’ project.
Partner ORTENGA in your next product concept, design, and development to realize that business goal.
ORTENGA has seasoned engineering from Autonomous Automotive, SATCOM, radar, Smart City, WiFi, and Mobile Terrestrial Radio Communications industries in Antenna, ASIC, HW, FW, and SW engineering disciplines.
Radar and Radio Communications Similarities
Radio Communications and Radar have been two distinct technologies in their own industries. However, in the past decade, the advancement of technologies both in Academia as well as implementations and integrations of radio and processor in to more devices from handheld to terminal based have led to some interesting overlaps between these two industries. This blog will briefly walk through the similarities and overlap of implementations.
Perhaps the most difficult problem of Terrestrial radio communications is fading mitigation. Fading is not only function of frequency but also of the environment or terrain. This makes it new problem to solve, every time, the radio is supposed to operate at different frequency or environment.
Radars typically operate in open environments and the small echo from their targets arrives at receiver directly. Any multipath echo is too small in amplitude to be resolved with meaningful information. On the other hand, the radar target aspects impact the radio signal similar to what environment do to radio communication signal. Target scintillation is well known issue to radar industries. Radar target scintillation can easily vary the amplitude of echo signal as much as 10dB for milli-radian variation of target aspect. Target scintillation is also function of frequency and target aspects.
Radar Cross Section, RCS, subject matter experts spend their life time to model various target at different frequencies to model radar echo signal behavior to design appropriate radar.
Multipath Fading in Terrestrial Communications and Target Scintillation of Radar Cross Section, RCS, requires appropriate waveform design. In Communications, the waveform depends on environment modulating this waveform and how to retrieve or reconstruct the waveform at the receiver. To optimize the waveform for maximum SINR, the waveform is carefully designed for its timing metrics.
In radar, the waveform depends on target modulating this waveform and how to retrieve desired information about the target. Target “finger print” is on the echo waveform. To optimize the waveform for maximum SINR, the waveform is carefully designed for its timing metrics.
MIMO technology utilized orthogonal waveforms from multiple transmit antennas, independent waveform, to arrives at the receivers and be combined in such a way that SINR is fairly constants for all receivers.
In case of MIMO radar, each orthogonal waveform is designed to one desired metrics of target and the received signals can be processed to retrieve the desired metric.
There are typically 4 models that are used to simulate the behavior of target RCS, Swerling 1, 2, 3, & 4.
Swerling models 1& 2 are based on independent and identical distribution, iid, scatters of target aspect, which is effectively similar to Rayleigh fading model. Swerling model 1 and 2 are slow and fast RCS variations with respect to dwelling time, i.e. slow and fast fading with respect to symbol time in radio communications.
Swerling models 3 & 4 are based on specular RCS aspect, similar to Rician fading with dominant path.
Swerling models 3 and 4 are slow and fast RCS variations with respect to dwelling time, i.e. slow and fast fading with respect to symbol time in radio communications.
It may be surprise to some as how similar the radar and terrestrial radio communications are, yet it worth to note it is behavior of radio waves in environment whether it is used for communications or radar.
ORTENGA is a consulting firm with Subject Matter Expertise in both Radio Communications and Automotive Radar applications.
ORTENGA designs and develops Radio Communication or Radar Waveform.
ORTENGA helps businesses to identify required technical features to realize their business goals.
ORTENGA is comprised of seasoned and skillful engineers who collaborate on innovative design in entrepreneurial environment to accomplish clients’ project.
ORTENGA has seasoned engineering from Autonomous Automotive, SATCOM, radar, Smart City, WiFi, and Mobile Terrestrial Radio Communications industries in Antenna, ASIC, HW, FW, and SW engineering disciplines.
What is Matched Filter and why it is used?
Matched filter is the transfer function of the impulse response of the receiver.
Matched filter is utilized in both radio communication or radar systems DSP to maximize the SNR.
In radio communication systems, the matched filter is shifted time inversed pilot (known signal by transmitter and receiver) signal.
In radar systems, the matched filter is shifted time inversed transmitted waveform.
By convolving the incoming signals with its original waveform, maximum SNR can be achieved for DSP, consequently enhancing data extractions from the incoming signals.
Once again, radio communications and radar systems show their relevance and similarity with albeit different linguistic.
ORTENGA helps businesses to identify required technical features to realize their business goals.
ORTENGA is comprised of seasoned and skillful engineers who collaborate on innovative design in entrepreneurial environment to accomplish clients’ project.
Partner ORTENGA in your next product concept, design, and development to realize that business goal.
ORTENGA has seasoned engineering from Autonomous Automotive, SATCOM, radar, Smart City, WiFi, and Mobile Terrestrial Radio Communications industries in Antenna, ASIC, HW, FW, and SW engineering disciplines.
Radar Beamwidth relationship to Radar Cross Section
Radar beamwidth can be related to Radar Cross Section, RCS.
RCS is function of wavelength or frequency.
For the target of interest at given frequency, the target’s RCS is typically either measured or simulated.
Given the target’s RCS, the required radar beamwidth can be estimated, consequently appropriate antenna taper and/or radar parameters to be chosen for the target detection and tracking.
“Detection is science, estimation is an art”.
Partner with ORTENGA to design and develop radar system and antenna module.
Bridging Radar and Radio Communications for Next-Generation RF Systems
Why unified system engineering matters across radar and radio communications
Harnessing the shared system-engineering foundations of radar and radio communications enables companies to accelerate product innovation while maximizing RF system performance.
As radar and radio communications technologies continue to evolve, the historical separation between them is becoming increasingly artificial. Advances in digital signal processing, multiple-input multiple-output (MIMO) architectures, semiconductor integration, and software-defined implementations have created substantial overlap at the system-engineering level. For organizations developing next-generation RF products—whether for autonomous vehicles, satellite communications, smart infrastructure, or wireless networks—recognizing and leveraging this overlap is now a strategic necessity.
Channel Variability: Environment vs. Target
A fundamental challenge shared by both radar and radio communications systems is signal variability. In terrestrial radio communications, this variability appears as fading, driven by the propagation environment—terrain, buildings, mobility, and frequency. Each operating scenario presents a unique channel that must be modeled, mitigated, and accommodated through system design.
Radar systems encounter a closely related phenomenon known as target scintillation. Here, variability arises from changes in a target’s geometry, material composition, and aspect angle. Even small variations in target orientation can result in significant fluctuations in echo amplitude. While the source differs—environment versus target—the physical mechanism is the same: radio waves interacting with complex, time-varying structures.
This shared behavior enables the use of similar modeling, mitigation, and optimization strategies across both domains.
(See Figure 1: Radar vs. Communications Channel Comparison and Figure 2: Fading vs. Target Scintillation.)


Different Waveforms, Shared System Models
Radar and radio communications systems employ different waveforms because they serve fundamentally different objectives. Communication waveforms are optimized for reliable data delivery through distorted channels, while radar waveforms are designed to extract target information from reflected signals.
Despite these differences, the overall system models used to describe radar and radio communications are fundamentally the same. In both cases, a transmitted waveform is modified by a channel—whether defined by the environment or by a target—and processed at the receiver to extract information. As a result, the system-engineering and modeling methodologies used in radar and communications are similar in nature. In practice, many of the perceived differences stem not from physics or mathematics, but from discipline-specific terminology.
This alignment at the system level is what enables meaningful cross-domain expertise and innovation.
(See Figure 3: Waveform Interaction.)

MIMO: A Shared Architectural Principle
MIMO technology further illustrates the convergence between radar and radio communications. In wireless communications, MIMO architectures use multiple antennas and independent signal paths to improve link reliability, capacity, and SINR.
In radar systems, MIMO techniques use multiple transmit and receive channels to illuminate targets with independent perspectives. The resulting signals are jointly processed to estimate parameters such as range, velocity, angle, and target structure. In both cases, spatial diversity is leveraged to improve robustness, resolution, and overall system performance, reinforcing the shared architectural foundation.
(See Figure 4: MIMO in Communications vs. Radar.)

Statistical Models: Different Names, Same Behavior
Radar engineers commonly use Swerling target models to describe variations in radar cross section (RCS). These models have direct analogs in the fading models used for radio communications:
- Swerling 1 and 2 correspond to Rayleigh fading, representing distributed scatterers without a dominant reflection.
- Swerling 3 and 4 correspond to Rician fading, where a strong specular component dominates.
The distinction lies in interpretation—communications engineers model environments, while radar engineers model targets—but the statistical behavior of the received signals is effectively the same.
(See Figure 5: Statistical Model Mapping.)

Matched Filters: A Common Signal-Processing Core
At the signal-processing level, both radar and radio communications rely on the matched filter as a fundamental building block. In communications systems, the matched filter correlates the received signal with a known reference or pilot. In radar systems, it correlates the received echo with the transmitted waveform.
In both cases, the objective is identical: maximize signal-to-noise ratio (SNR) to enable reliable information extraction. This shared DSP foundation further underscores that radar and communications systems differ primarily in application and terminology, not in core engineering principles.
(See Figure 6: Matched Filter Concept.)

Why Unified System Engineering Matters
As modern RF products increasingly integrate communications, sensing, and computation, siloed expertise is no longer sufficient. Autonomous vehicles, satellite platforms, smart cities, and advanced wireless networks all require a unified system-engineering perspective that spans both radar and radio communications.
Organizations that embrace this convergence benefit from faster development cycles, reduced technical risk, and superior system-level optimization. ORTENGA brings deep experience across both domains, helping businesses apply unified system engineering to complex RF challenges. By aligning modeling, architecture, and signal-processing decisions with business objectives, ORTENGA ensures RF systems are not only technically robust, but also strategically positioned for long-term success.
Designing for Seconds, Not Meters
Reframing Automotive Radar Architecture for High-Speed Safety

In our earlier discussion on Automotive Short-Range Radar, SRR, and Long-Range Radar, LRR, we examined sensing performance in meters. Range specifications, frequency bands, and detection distance often dominate radar discussions. Yet high speed safety is not governed by meters alone. It is governed by time.
At 130 km per hour, hard braking under 0.6 g requires approximately 6 seconds. That is the physical lower bound. It assumes immediate hazard recognition and immediate brake application.
At 130 km per hour, the vehicle travels about 36 meters per second. A 300-meter sensing range therefore provides only about 8 seconds of forward awareness.
Eight seconds sits close to the 6 second braking floor. That leaves minimal time for observation, interpretation, and decision before action must begin.
Stopping distance is not planning margin.
If automotive radar is to support sustained highway autonomy, safety must be defined in seconds, not meters.
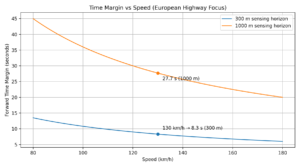
Time margin compresses rapidly at highway speeds. At 130 km per hour, a 300-meter sensing horizon yields approximately 8 seconds of forward awareness.
From Braking Floor to Design Target
If six seconds represents the emergency braking floor, radar architecture must operate above that threshold.
A practical autonomy system requires additional time to observe, confirm, and decide before committing to control action. Perception must stabilize. Object classification must reach confidence. Trajectory options must be evaluated. These processes consume time.
For sustained high speed operation, a minimum of 10 seconds of forward time margin is a defensible design target.
At 130 km per hour, ten seconds corresponds to approximately 360 meters of reliable forward awareness.
Below six seconds, the system is in emergency mode. Between six and ten seconds, behavior becomes constrained. Above ten seconds, the system regains the ability to act deliberately rather than reactively.
This is not a range specification. It is a time doctrine.
Distance is simply the consequence of speed multiplied by required time.
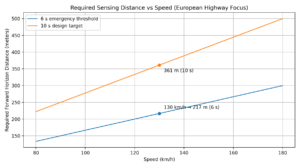
Time based safety doctrine translated into distance. At 130 km per hour, ten seconds corresponds to approximately 360 meters. Six seconds corresponds to approximately 220 meters.
Architectural Consequences for Radar
Current production long range radar systems commonly operate in the 250 to 300 meters regime under nominal conditions.
At 130 km per hour, 250 meters corresponds to approximately 7 seconds of forward awareness. At 300 meters, the margin increases to approximately 8 seconds.
Both values sit close to the 6 second emergency threshold and below the 10 second design target.
This is not a criticism of existing systems. It reflects historical optimization priorities. Range, resolution, bandwidth, antenna aperture, processing gain, field of view, latency, cost, and regulation all compete within constrained packaging and power budgets.
Extending forward horizon is not a single parameter adjustment.
Increasing antenna gain narrows beamwidth and affects coverage.
Increasing processing gain increases integration time and latency.
Increasing bandwidth raises the thermal noise floor.
Increasing transmit power interacts with regulatory limits.
Every improvement in range competes with update rate, coverage, and computational budget.
When safety is defined in seconds rather than meters, radar tradeoffs become explicit.
The challenge is no longer whether a radar can detect a target at a certain distance. The challenge is whether the radar architecture preserves sufficient forward time margin at sustained highway speeds.
That is a system level question.
ORTENGA System Definition
High speed autonomy is constrained by time.
When safety is defined in meters, architecture gravitates toward range claims. When safety is defined in seconds, radar becomes part of a broader time management architecture across sensing, processing, and control.
A system level approach is defensible because it begins with physics and converts safety into measurable time budgets. That clarity gives design teams a stable reference point. When specification tensions arise between range, bandwidth, antenna gain, latency, cost, and regulation, tradeoffs can be evaluated against explicit time margin targets rather than isolated component metrics.
This is how ORTENGA defines system requirements.
Audit
We quantify available time margin as a function of speed, sensing horizon, braking capability, and environmental assumptions. We identify where architecture approaches reactive thresholds.
Design
We align antenna architecture, processing strategy, bandwidth allocation, and control policy around explicit time-based doctrine. Tradeoffs are measured against preserved seconds of margin.
Validate
We verify that sensing and control maintain minimum time thresholds under variation in speed, weather, and target reflectivity.
When seconds define safety, architecture gains clarity.
Clarity enables disciplined engineering decisions.
That is the ORTENGA system level approach.
The Radar That Never Transmits
How Passive Sensing Turns Ambient Electromagnetic Signals Into Detection Infrastructure
Traditional radar systems operate on a simple principle: transmit electromagnetic (EM) energy and analyze the echoes reflected from objects in the environment.
Passive radar operates differently.
Instead of transmitting its own signal, a passive radar system leverages electromagnetic emissions that already exist in the environment, such as signals from:
- Television broadcast stations
- Cellular base stations
- FM radio transmitters
- Satellite communication signals
- WiFi networks
These signals continuously illuminate the environment. Passive radar systems observe how these signals change when a target enters the propagation path.
How Passive Radar Works
A passive radar system typically uses two receiving channels.
Reference Channel
Receives the direct signal from the external transmitter.
Surveillance Channel
Receives reflections of that same signal after it interacts with objects in the environment.
By comparing these two signals, the system can detect:
- Time delay
- Doppler shift
- Phase changes
These differences reveal the presence, location, and motion of a target.
Unlike traditional radar, the system does not need to transmit any energy, making it inherently covert and spectrum efficient.
Passive Radar Architecture

The passive radar architecture relies on external transmitters known as illuminators of opportunity. These transmitters continuously broadcast electromagnetic signals that illuminate the environment.
The passive radar system uses two receiving paths:
Reference Receiver
Captures the direct signal from the transmitter to establish the baseline waveform.
Surveillance Receiver
Captures signals that have propagated through the environment and reflected from objects such as aircraft, vehicles, or other targets.
A signal processing engine then compares the two signals using techniques such as:
- Cross-correlation
- Doppler analysis
- Time-delay estimation
Any measurable deviation between the reference signal and the surveillance signal indicates that an object has altered the propagation of the electromagnetic wave.
In essence, passive radar is not detecting echoes from its own transmission.
It is detecting disturbances in the ambient electromagnetic field.
Why Receiver Sensitivity and Signal Processing Matter
Because passive radar does not control the transmitted waveform or power level, performance relies heavily on:
- High receiver sensitivity
- Low-noise RF front-end design
- Advanced signal processing
- Accurate environmental reference modeling
The system must detect very small perturbations in the ambient electromagnetic environment, often buried deep in noise or clutter.
In practice, this requires:
- High dynamic range receivers
- Sophisticated cross-correlation algorithms
- Continuous calibration against baseline environmental signals
Passive radar is therefore as much a signal processing and system architecture challenge as it is an RF engineering problem.
Passive Sensing in Indoor Environments
A related concept has been demonstrated in indoor environments using WiFi signals.
Researchers such as Professor Dina Katabi at MIT have shown that WiFi reflections inside buildings can be used to detect and track human motion, including monitoring elderly individuals without requiring them to wear any device.
In these systems, small changes in WiFi signal propagation reveal:
- Movement
- Position
- Breathing patterns
- Even falls
The underlying principle remains the same: observe how existing electromagnetic signals interact with the environment and identify deviations from the expected baseline.
Strategic Value of Passive Radar
Passive radar offers several advantages.
Low probability of detection
Because the system does not transmit energy, it is difficult for adversaries to detect the radar itself.
Spectrum efficiency
Passive radar leverages existing transmissions rather than occupying additional spectrum.
Reduced infrastructure
Transmitters and high-power amplifiers are not required.
However, these benefits come with system-level challenges:
- Dependence on external transmitters
- Limited control of waveform properties
- Complex signal processing requirements
- Environmental modeling complexity
Successfully deploying passive sensing systems therefore requires tight integration between RF engineering, signal processing, and system architecture.
ORTENGA Perspective
Passive radar is not simply a receiver design problem.
It is a system architecture problem involving:
- RF sensitivity
- signal processing algorithms
- environmental modeling
- and use-case driven system requirements.
ORTENGA helps organizations identify the technical architecture required to translate sensing concepts into deployable systems, ensuring engineering teams design products aligned with real operational objectives.